
#
📌 Perceptron이란?
- 1957년 프랭크 로젠브라트가 고안한 최초의 인공신경망 모델 중 하나.
- 생물학적 뉴런을 수학적으로 모델링한 인공 뉴런으로, 여러 입력 신호를 받아 각각의 가중치를 곱한 후 이를 합산하여, 활성화 함수를 통해 단일 신호를 출력한다.
- 퍼셉트론의 출력은 신호 유무 (1 또는 0)로 표현된고, 이진 분류 문제 해결에 효과적이다.
📝 Perceptron AND_GATE 실습
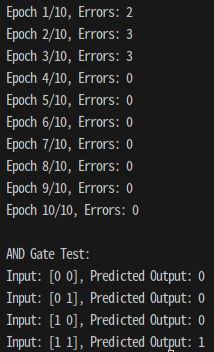
🔍 AND 게이트 모델 훈련 후 결과 확인
import numpy as np
import matplotlib.pyplot as plt
class Perceptron:
def __init__(self, input_size, lr=0.1, epochs=10):
self.weights = np.zeros(input_size)
self.bias = 0
self.lr = lr
self.epochs = epochs
self.errors = []
def activation(self, x):
return np.where(x >= 0, 1, 0)
def predict(self, x):
linear_output = np.dot(x, self.weights) + self.bias
return self.activation(linear_output)
def train(self, X, y):
for epoch in range(self.epochs):
total_error = 0
for x1, target in zip(X, y):
prediction = self.predict(x1)
update = self.lr * (target - prediction)
self.weights += update * x1
self.bias += update
total_error += int(update != 0)
self.errors.append(total_error)
print(f"Epoch {epoch+1}/{self.epochs}, Errors: {total_error}")
# AND 게이트 데이터
X_and = np.array([[0,0],[0,1],[1,0],[1,1]])
y_and = np.array([0,0,0,1])
# 퍼셉트론 모델 훈련
ppn_and = Perceptron(input_size=2)
ppn_and.train(X_and, y_and)
# 예측 결과 확인
print("\nAND Gate Test:")
for x in X_and:
print(f"Input: {x}, Predicted Output: {ppn_and.predict(x)}")
💡 출력 결과
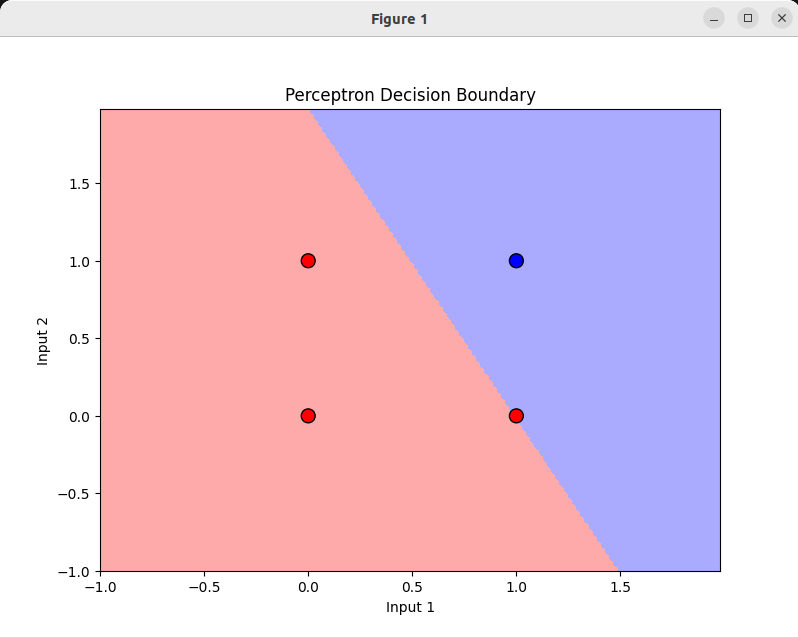
🔍 AND 게이트 결정 경계 시각화
from matplotlib.colors import ListedColormap
def plot_decision_boundary(X, y, model):
cmap_light = ListedColormap(['#FFAAAA', '#AAAAFF'])
cmap_bold = ListedColormap(['#FF0000', '#0000FF'])
h = .02 # mesh grid 간격
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
Z = model.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
plt.figure(figsize=(8, 6))
plt.contourf(xx, yy, Z, cmap=cmap_light)
# 실제 데이터 포인트 표시
plt.scatter(X[:, 0], X[:, 1], c=y, cmap=cmap_bold,
edgecolor='k', s=100, marker='o')
plt.xlabel('Input 1')
plt.ylabel('Input 2')
plt.title('Perceptron Decision Boundary')
plt.show()
# AND 게이트 결정 경계 시각화
plot_decision_boundary(X_and, y_and, ppn_and)
💡 출력 결과
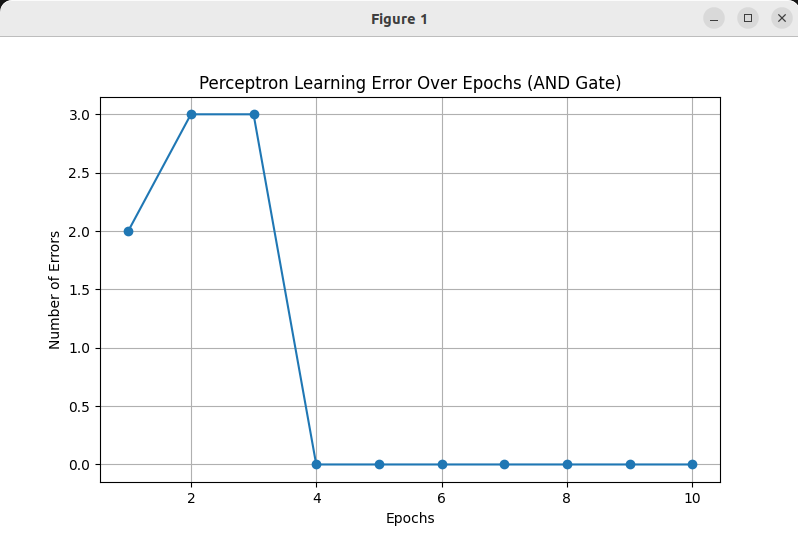
🔍 오류 시각화
plt.figure(figsize=(8, 5))
plt.plot(range(1, len(ppn_and.errors) + 1), ppn_and.errors, marker='o')
plt.xlabel('Epochs')
plt.ylabel('Number of Errors')
plt.title('Perceptron Learning Error Over Epochs (AND Gate)')
plt.grid(True)
plt.show()
💡 출력 결과
📝 Perceptron OR_GATE 실습
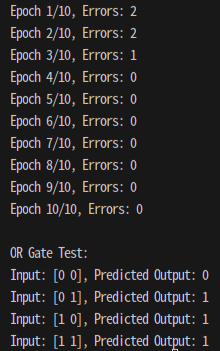
🔍 OR 게이트 모델 훈련 후 결과 확인
import numpy as np
import matplotlib.pyplot as plt
class Perceptron:
def __init__(self, input_size, lr=0.1, epochs=10):
self.weights = np.zeros(input_size)
self.bias = 0
self.lr = lr
self.epochs = epochs
self.errors = []
def activation(self, x):
return np.where(x >= 0, 1, 0)
def predict(self, x):
linear_output = np.dot(x, self.weights) + self.bias
return self.activation(linear_output)
def train(self, X, y):
for epoch in range(self.epochs):
total_error = 0
for x1, target in zip(X, y):
prediction = self.predict(x1)
update = self.lr * (target - prediction)
self.weights += update * x1
self.bias += update
total_error += int(update != 0)
self.errors.append(total_error)
print(f"Epoch {epoch+1}/{self.epochs}, Errors: {total_error}")
# OR 게이트 데이터
X_or = np.array([[0,0],[0,1],[1,0],[1,1]])
y_or = np.array([0,1,1,1])
# 퍼셉트론 모델 훈련
ppn_or = Perceptron(input_size=2)
ppn_or.train(X_or, y_or)
# 예측 결과 확인
print("\nOR Gate Test:")
for x in X_or:
print(f"Input: {x}, Predicted Output: {ppn_or.predict(x)}")
💡 출력 결과
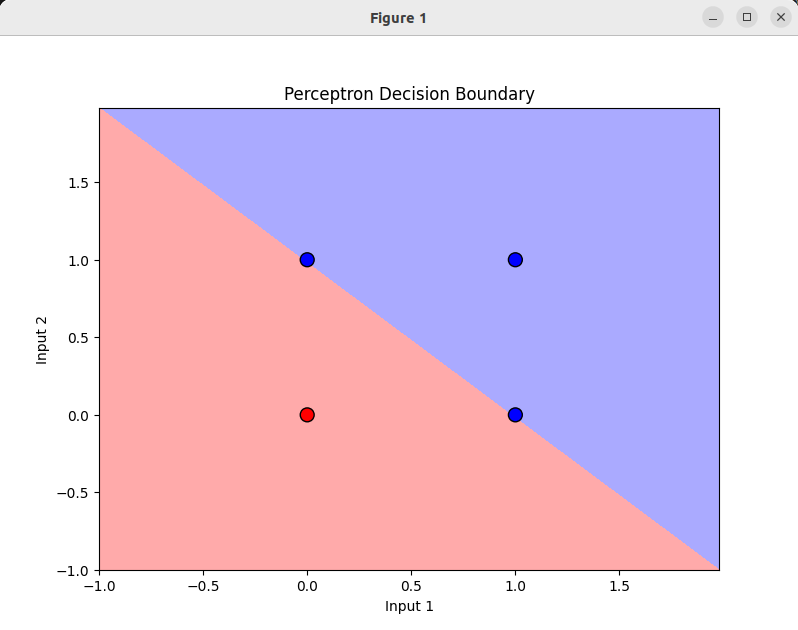
🔍 OR 게이트 결정 경계 시각화
from matplotlib.colors import ListedColormap
def plot_decision_boundary(X, y, model):
cmap_light = ListedColormap(['#FFAAAA', '#AAAAFF'])
cmap_bold = ListedColormap(['#FF0000', '#0000FF'])
h = .02 # mesh grid 간격
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
Z = model.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
plt.figure(figsize=(8, 6))
plt.contourf(xx, yy, Z, cmap=cmap_light)
# 실제 데이터 포인트 표시
plt.scatter(X[:, 0], X[:, 1], c=y, cmap=cmap_bold,
edgecolor='k', s=100, marker='o')
plt.xlabel('Input 1')
plt.ylabel('Input 2')
plt.title('Perceptron Decision Boundary')
plt.show()
# OR 게이트 결정 경계 시각화
plot_decision_boundary(X_or, y_or, ppn_or)
💡 출력 결과
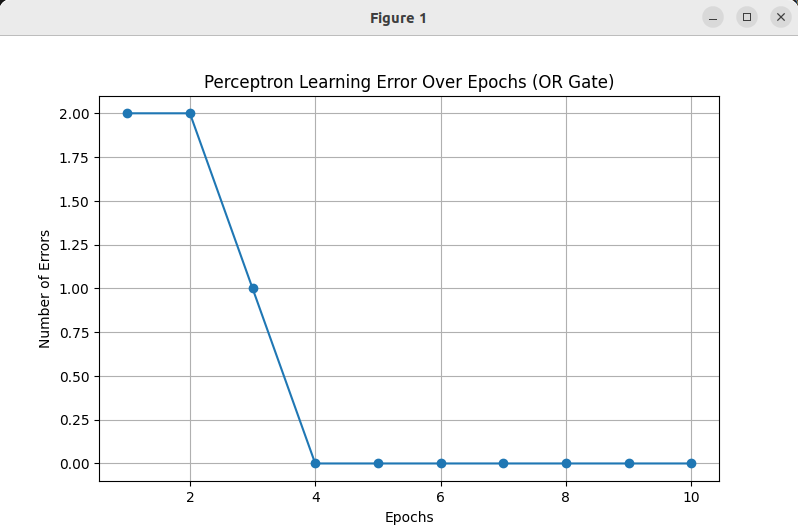
🔍 오류 시각화
plt.figure(figsize=(8, 5))
plt.plot(range(1, len(ppn_or.errors) + 1), ppn_or.errors, marker='o')
plt.xlabel('Epochs')
plt.ylabel('Number of Errors')
plt.title('Perceptron Learning Error Over Epochs (OR Gate)')
plt.grid(True)
plt.show()
💡 출력 결과
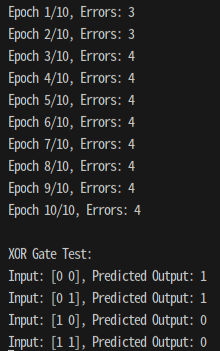
📝 Perceptron NAND_GATE 실습
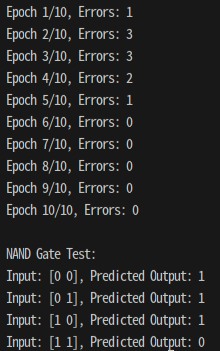
🔍 NAND 게이트 모델 훈련 후 결과 확인
import numpy as np
import matplotlib.pyplot as plt
class Perceptron:
def __init__(self, input_size, lr=0.1, epochs=10):
self.weights = np.zeros(input_size)
self.bias = 0
self.lr = lr
self.epochs = epochs
self.errors = []
def activation(self, x):
return np.where(x >= 0, 1, 0)
def predict(self, x):
linear_output = np.dot(x, self.weights) + self.bias
return self.activation(linear_output)
def train(self, X, y):
for epoch in range(self.epochs):
total_error = 0
for x1, target in zip(X, y):
prediction = self.predict(x1)
update = self.lr * (target - prediction)
self.weights += update * x1
self.bias += update
total_error += int(update != 0)
self.errors.append(total_error)
print(f"Epoch {epoch+1}/{self.epochs}, Errors: {total_error}")
# NAND 게이트 데이터
X_nand = np.array([[0,0],[0,1],[1,0],[1,1]])
y_nand = np.array([1,1,1,0])
# 퍼셉트론 모델 훈련
ppn_nand = Perceptron(input_size=2)
ppn_nand.train(X_nand, y_nand)
# 예측 결과 확인
print("\nNAND Gate Test:")
for x in X_nand:
print(f"Input: {x}, Predicted Output: {ppn_nand.predict(x)}")
💡 출력 결과
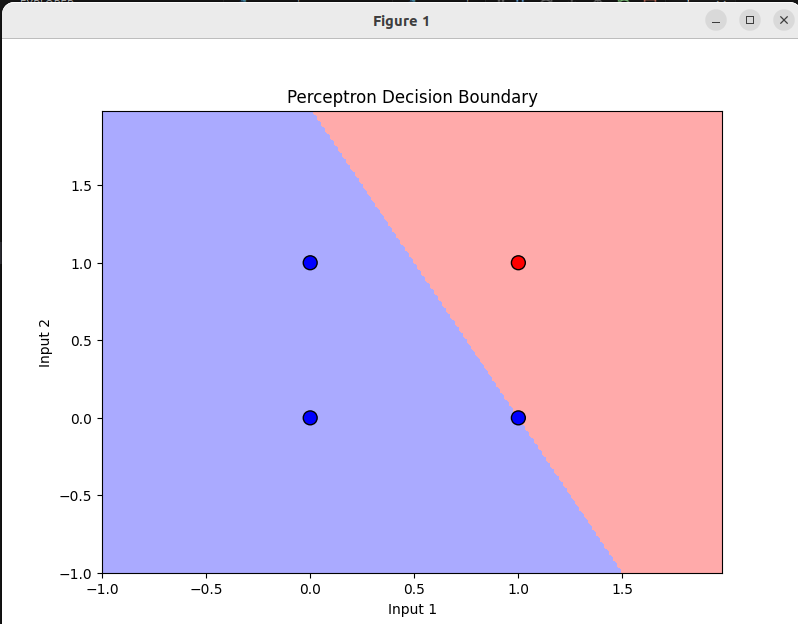
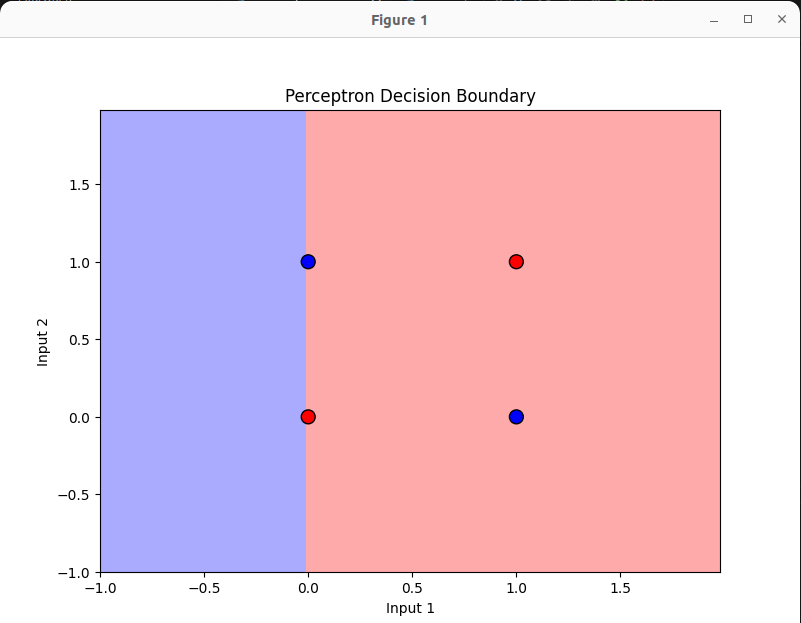
🔍 NAND 게이트 결정 경계 시각화
from matplotlib.colors import ListedColormap
def plot_decision_boundary(X, y, model):
cmap_light = ListedColormap(['#FFAAAA', '#AAAAFF'])
cmap_bold = ListedColormap(['#FF0000', '#0000FF'])
h = .02 # mesh grid 간격
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
Z = model.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
plt.figure(figsize=(8, 6))
plt.contourf(xx, yy, Z, cmap=cmap_light)
# 실제 데이터 포인트 표시
plt.scatter(X[:, 0], X[:, 1], c=y, cmap=cmap_bold,
edgecolor='k', s=100, marker='o')
plt.xlabel('Input 1')
plt.ylabel('Input 2')
plt.title('Perceptron Decision Boundary')
plt.show()
# NAND 게이트 결정 경계 시각화
plot_decision_boundary(X_nand, y_nand, ppn_nand)
💡 출력 결과
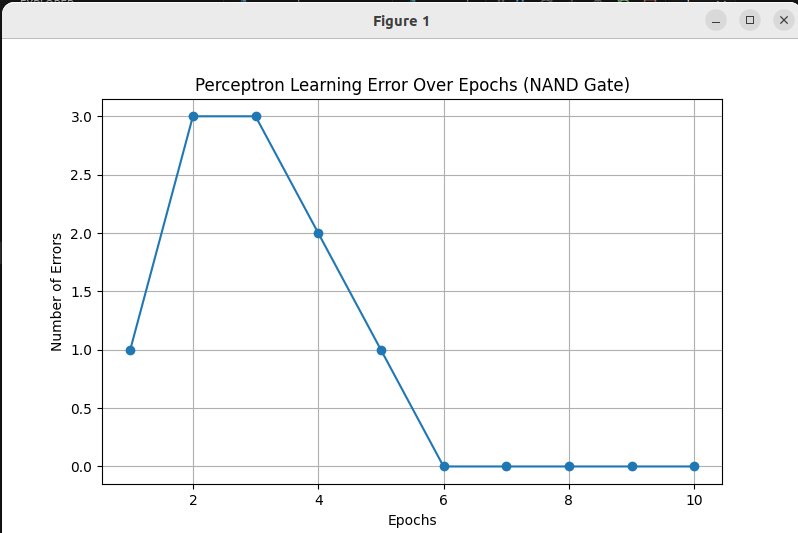
🔍 오류 시각화
plt.figure(figsize=(8, 5))
plt.plot(range(1, len(ppn_or.errors) + 1), ppn_or.errors, marker='o')
plt.xlabel('Epochs')
plt.ylabel('Number of Errors')
plt.title('Perceptron Learning Error Over Epochs (OR Gate)')
plt.grid(True)
plt.show()
💡 출력 결과
📝 Perceptron XOR_GATE 실습
🔍 XOR 게이트 모델 훈련 후 결과 확인
import numpy as np
import matplotlib.pyplot as plt
class Perceptron:
def __init__(self, input_size, lr=0.1, epochs=10):
self.weights = np.zeros(input_size)
self.bias = 0
self.lr = lr
self.epochs = epochs
self.errors = []
def activation(self, x):
return np.where(x >= 0, 1, 0)
def predict(self, x):
linear_output = np.dot(x, self.weights) + self.bias
return self.activation(linear_output)
def train(self, X, y):
for epoch in range(self.epochs):
total_error = 0
for x1, target in zip(X, y):
prediction = self.predict(x1)
update = self.lr * (target - prediction)
self.weights += update * x1
self.bias += update
total_error += int(update != 0)
self.errors.append(total_error)
print(f"Epoch {epoch+1}/{self.epochs}, Errors: {total_error}")
# XOR 게이트 데이터
X_xor = np.array([[0,0],[0,1],[1,0],[1,1]])
y_xor = np.array([0,1,1,0])
# 퍼셉트론 모델 훈련
ppn_xor = Perceptron(input_size=2)
ppn_xor.train(X_xor, y_xor)
# 예측 결과 확인
print("\nXOR Gate Test:")
for x in X_xor:
print(f"Input: {x}, Predicted Output: {ppn_xor.predict(x)}")
💡 출력 결과
🔍 XOR 게이트 결정 경계 시각화
from matplotlib.colors import ListedColormap
def plot_decision_boundary(X, y, model):
cmap_light = ListedColormap(['#FFAAAA', '#AAAAFF'])
cmap_bold = ListedColormap(['#FF0000', '#0000FF'])
h = .02 # mesh grid 간격
x_min, x_max = X[:, 0].min() - 1, X[:, 0].max() + 1
y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
Z = model.predict(np.c_[xx.ravel(), yy.ravel()])
Z = Z.reshape(xx.shape)
plt.figure(figsize=(8, 6))
plt.contourf(xx, yy, Z, cmap=cmap_light)
# 실제 데이터 포인트 표시
plt.scatter(X[:, 0], X[:, 1], c=y, cmap=cmap_bold,
edgecolor='k', s=100, marker='o')
plt.xlabel('Input 1')
plt.ylabel('Input 2')
plt.title('Perceptron Decision Boundary')
plt.show()
# XOR 게이트 결정 경계 시각화
plot_decision_boundary(X_xor, y_xor, ppn_xor)
💡 출력 결과
🔍 오류 시각화
plt.figure(figsize=(8, 5))
plt.plot(range(1, len(ppn_or.errors) + 1), ppn_or.errors, marker='o')
plt.xlabel('Epochs')
plt.ylabel('Number of Errors')
plt.title('Perceptron Learning Error Over Epochs (OR Gate)')
plt.grid(True)
plt.show()
💡 출력 결과
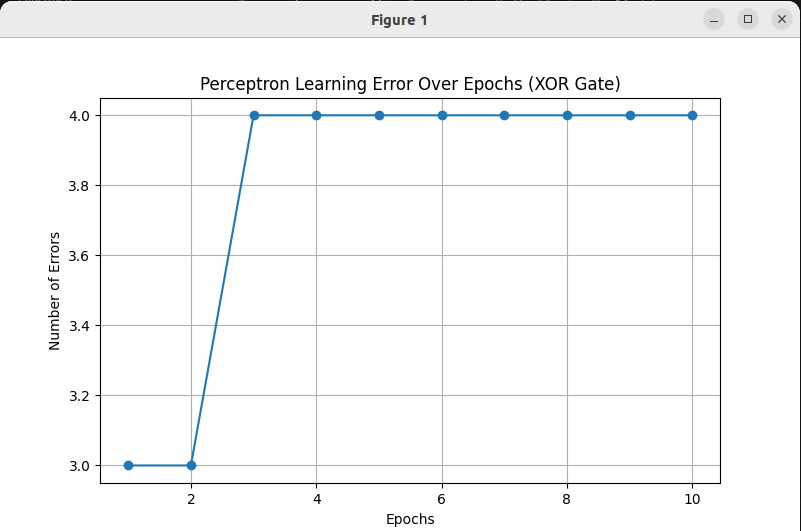
🚨 단층 Perceptron의 한계점
- XOR GATE는 퍼셉트론으로 학습이 되지 않는 문제가 발생하였다.
- 퍼셉트론은 직선 하나로 ●와 ○를 나눌 수 있어야 학습이 된다.
- 하지만 XOR은 직선 하나로는 절대 ●와 ○를 나눌 수 없다.