📝 학습목표
- OpenCV(Open Source Computer Vision Library)를 활용하여 이미지/비디오 처리하기
1. 이미지 Read & Write
📂 이미지 파일 준비

import numpy as np
import cv2
img = cv2.imread("image.jpg")
cv2.namedWindow("image", cv2.WINDOW_NORMAL)
print(img.shape)
cv2.imshow("image", img)
cv2.waitKey(0)
cv2.imwrite("output.png", img)
cv2.destroyAllWindows()
💡 출력 결과


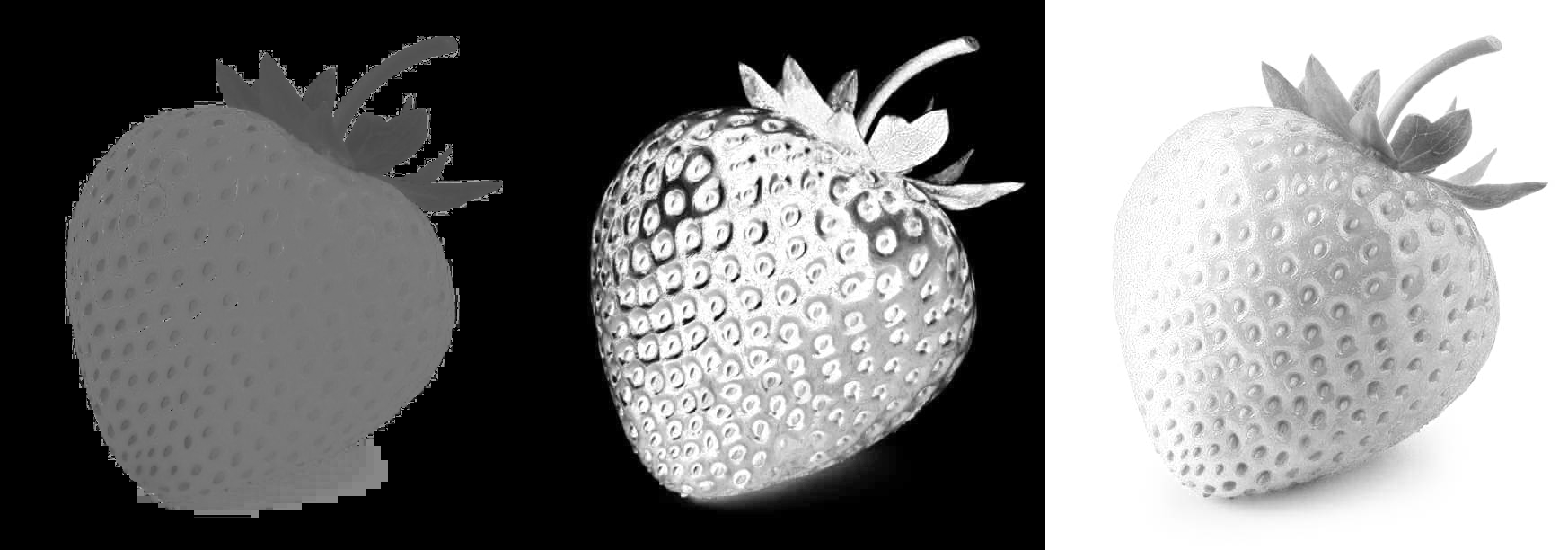
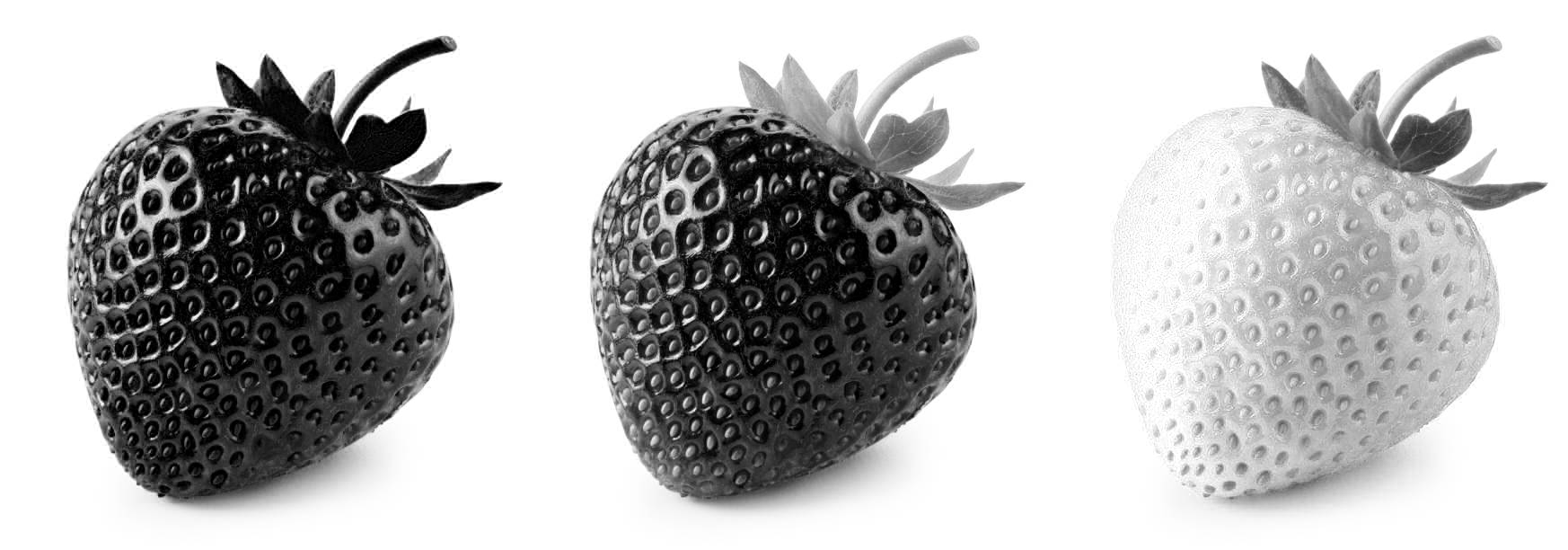
2. 색상 채널 분리와 색공간 변환
📂 이미지 파일 준비

import numpy as np
import cv2
color = cv2.imread("strawberry.jpg", cv2.IMREAD_COLOR)
print(color.shape)
height, width, channels = color.shape
cv2.imshow("Original Image", color)
r,g,b = cv2.split(color)
rgb_split = np.concatenate((r,g,b), axis=1)
cv2.imshow("RGB Channels", rgb_split)
hsv = cv2.cvtColor(color, cv2.COLOR_RGB2HSV)
h,s,v = cv2.split(hsv)
hsv_split = np.concatenate((h,s,v),axis=1)
cv2.imshow("Split HSV", hsv_split)
cv2.waitKey(0)
cv2.imwrite("hsv2rgb_split.png", hsv_split)
💡 출력 결과
3. 이미지 일부 영역 자르기, 크기 바꾸기, 회전하기
📂 이미지 파일 준비
import numpy as np
import cv2
img = cv2.imread("image.jpg")
print(img.shape) # 0,100
cropped = img[0:220, 185:385] #220, 200, 3
print(cropped.shape)
resized = cv2.resize(cropped, (400,200))
print(resized.shape)
rotated_90 = cv2.rotate(resized, cv2.ROTATE_90_CLOCKWISE)
#rotated_180 = cv2.rotate(image, cv2.ROTATE_180)
#rotated_270 = cv2.rotate(image, cv2.ROTATE_90_COUNTERCLOCKWISE)
cv2.imshow("Origin", img)
cv2.imshow("Cropped image", cropped)
cv2.imshow("Resized image", resized)
cv2.imshow("Rotated 90 image", rotated_90)
cv2.waitKey(0)
cv2.destroyAllWindows()
💡 출력 결과

cropped

resized

rotated_90
4. 원본 색상 반전시키기
📂 이미지 파일 준비
import numpy as np
import cv2
src = cv2.imread("output.png", cv2.IMREAD_COLOR)
dst = cv2.bitwise_not(src)
cv2.imshow("src", src)
cv2.imshow("dst", dst)
cv2.waitKey()
cv2.destroyAllWindows()
💡 출력 결과

5. 임계값 기준으로 이진화시키기
📂 이미지 파일 준비
import cv2
src = cv2.imread("image.jpg", cv2.IMREAD_COLOR)
gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
ret, dst = cv2.threshold(gray, 100, 255, cv2.THRESH_BINARY)
cv2.imshow("dst", dst)
cv2.waitKey()
cv2.destroyAllWindows()
💡 출력 결과

6. 이미지 흐리게(블러) 처리
📂 이미지 파일 준비
import cv2
src = cv2.imread("image.jpg", cv2.IMREAD_COLOR)
dst = cv2.blur(src, (9, 9), anchor=(-1, -1), borderType=cv2.BORDER_DEFAULT)
cv2.imshow("dst", dst)
cv2.waitKey()
cv2.destroyAllWindows()
💡 출력 결과

7. 세 가지 대표적인 엣지(경계) 검출 알고리즘
📂 이미지 파일 준비
import cv2
src = cv2.imread("image.jpg", cv2.IMREAD_COLOR)
gray = cv2.cvtColor(src, cv2.COLOR_BGR2GRAY)
sobel = cv2.Sobel(gray, cv2.CV_8U, 1, 0, 3)
cv2.imshow("sobel", sobel)
laplacian = cv2.Laplacian(gray, cv2.CV_8U, ksize=3)
cv2.imshow("laplacian", laplacian)
canny = cv2.Canny(gray, 100, 200)
cv2.imshow("canny", canny)
cv2.waitKey()
cv2.destroyAllWindows()
💡 출력 결과
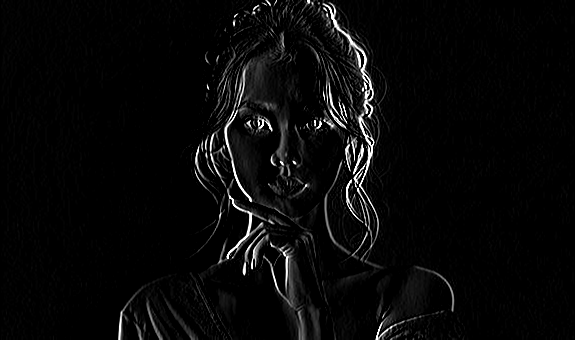
sobel
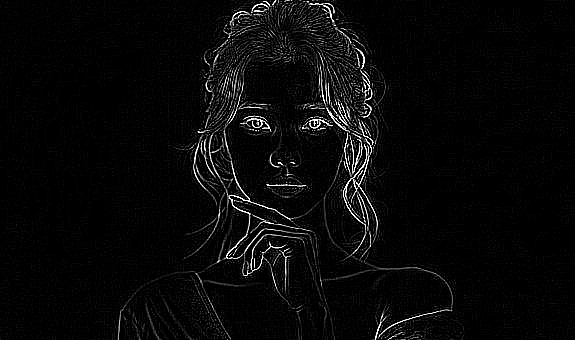
laplacian
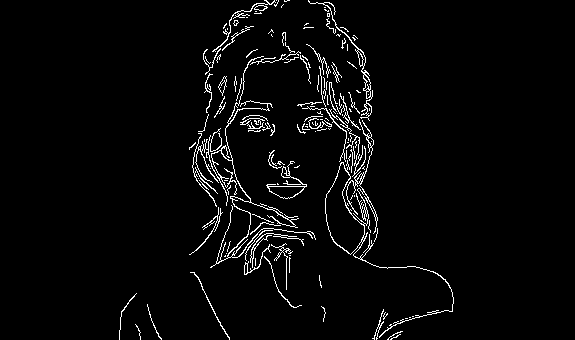
canny
8. 컬러 이미지의 BGR(Blue, Green, Red) 채널을 분리 후 채널 순서를 바꿔서 이미지 합치기
📂 이미지 파일 준비

import numpy as np
import cv2
src = cv2.imread("image.jpg", cv2.IMREAD_COLOR)
#b,g,r = cv2.split(src)
b = src[:, :, 0]
g = src[:, :, 1]
r = src[:, :, 2]
inverse = cv2.merge((r,g,b))
cv2.imshow("b", b)
cv2.imshow("g", g)
cv2.imshow("r", r)
cv2.imshow("inverse", inverse)
cv2.waitKey()
cv2.destroyAllWindows()
💡 출력 결과
B
G
R

inverse
9. 컬러 이미지의 BGR(Blue, Green, Red) 채널을 분리 후 Red 채널만 0(검정색)
📂 이미지 파일 준비
import numpy as np
import cv2
src = cv2.imread("bgr.png", cv2.IMREAD_COLOR)
b = src[:, :, 0]
g = src[:, :, 1]
r = src[:, :, 2]
height, width, channel = src.shape
zero = np.zeros((height, width, 1), dtype=np.uint8)
bgz = cv2.merge((b, g, zero))
cv2.imshow("b", b)
cv2.imshow("g", g)
cv2.imshow("r", r)
cv2.imshow("bgz", bgz)
cv2.waitKey()
cv2.destroyAllWindows()
💡 출력 결과
B
G
R
bgz
10. 동영상에서 원하는 장면을 이미지로 캡처하기
📂 동영상 파일 준비
import numpy as np
import cv2
import os
save_dir = "SON"
os.makedirs(save_dir, exist_ok=True)
cap = cv2.VideoCapture("output.mp4")
img_idx = 1
while cap.isOpened():
ret, frame = cap.read()
if not ret:
cap.set(cv2.CAP_PROP_POS_FRAMES, 0)
continue
height, width = frame.shape[:2]
small_frame = cv2.resize(frame, (width // 2, height // 2), interpolation=cv2.INTER_AREA)
cv2.imshow("Frame", small_frame)
key = cv2.waitKey(80)
if key & 0xFF == ord('q'):
break
if key & 0xFF == ord('c'):
while True:
filename = f"{img_idx:03d}.jpg"
filepath = os.path.join(save_dir, filename)
if not os.path.exists(filepath):
cv2.imwrite(filepath, small_frame)
print(f"Saved {filepath}")
img_idx += 1
break
else:
img_idx += 1
cap.release()
cv2.destroyAllWindows()
💡 출력 결과
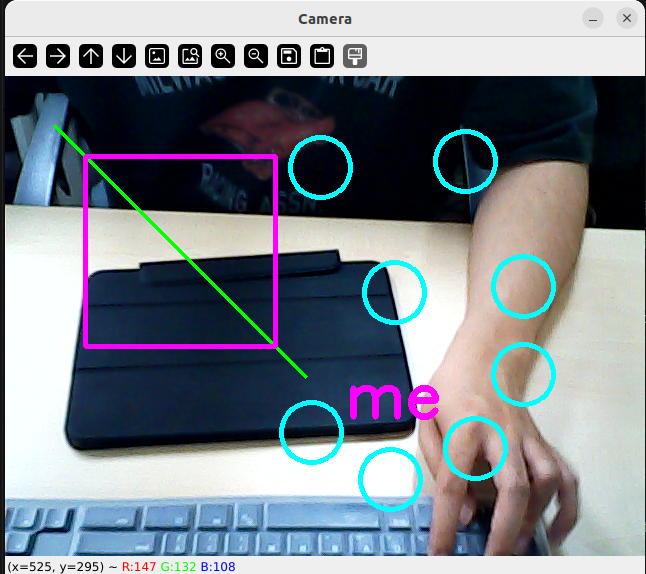
11. 다양한 OpenCV 그리기 함수 사용해보기
import numpy as np
import cv2
cap = cv2.VideoCapture(5)
circle_centers = []
def draw_circle(event, x, y, flags, param):
if event == cv2.EVENT_LBUTTONDOWN:
circle_centers.append((x, y))
cv2.namedWindow("Camera")
cv2.setMouseCallback("Camera", draw_circle)
topLeft = (50, 50)
bottomRight = (300, 300)
while cap.isOpened():
ret, frame = cap.read()
if not ret:
break
cv2.line(frame, topLeft, bottomRight, (0, 255, 0), 3)
cv2.rectangle(frame,
[pt+30 for pt in topLeft], [pt-30 for pt in bottomRight], (255, 0, 255), 3)
font = cv2.FONT_ITALIC
cv2.putText(frame, 'me',
[pt+40 for pt in bottomRight], font, 2, (255, 0, 255), 5)
for center in circle_centers:
cv2.circle(frame, center, 30, (255, 255, 0), 3)
cv2.imshow("Camera", frame)
key = cv2.waitKey(1)
if key & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
💡 출력 결과
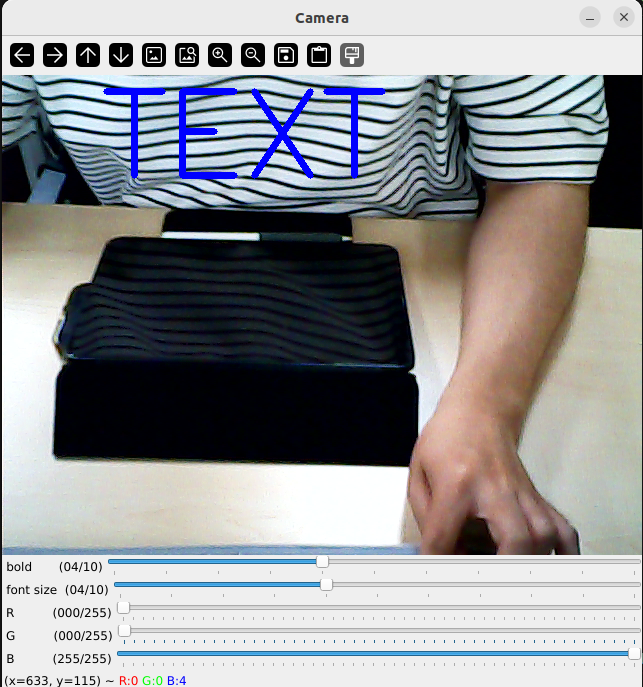
12. 실시간 카메라 영상 위에 글자 출력하고 트랙바로 굵기, 크기, 색상 조절하기
import numpy as np
import cv2
cap = cv2.VideoCapture(4)
#initial
topLeft = (100, 100)
bold = 0
font_size = 1
r, g, b = 0, 255, 255
def on_bold_trackbar(value):
global bold
bold = value
def on_fontsize_trackbar(value):
global font_size
font_size = max(1, value)
def on_r(val):
global r
r = val
def on_g(val):
global g
g = val
def on_b(val):
global b
b = val
cv2.namedWindow("Camera")
cv2.createTrackbar("bold", "Camera", bold, 10, on_bold_trackbar)
cv2.createTrackbar("font size", "Camera", font_size, 10, on_fontsize_trackbar)
cv2.createTrackbar('R', 'Camera', 0, 255, on_r)
cv2.createTrackbar('G', 'Camera', 255, 255, on_g)
cv2.createTrackbar('B', 'Camera', 255, 255, on_b)
while cap.isOpened():
ret, frame = cap.read()
if ret is False:
print("Can't receive frame (stream end?). Exiting . . .")
break
# Text
cv2.putText(frame, 'TEXT', topLeft, cv2.FONT_HERSHEY_SIMPLEX, font_size, (b, g, r), 1 + bold)
# Display
cv2.imshow("Camera", frame)
key = cv2.waitKey(1)
if key & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
💡 출력 결과
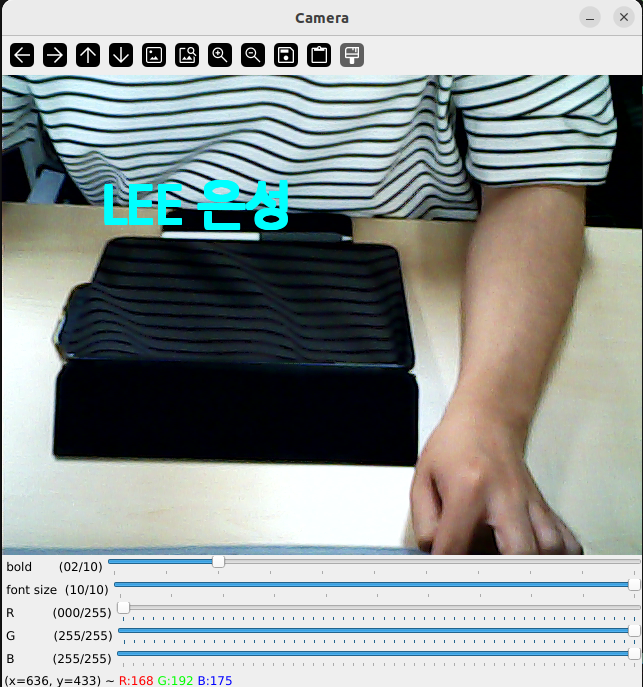
13. 실시간 카메라 영상 위에 한글 출력하고 트랙바로 굵기, 크기, 색상 조절하기
import numpy as np
import cv2
from PIL import ImageFont, ImageDraw, Image
cap = cv2.VideoCapture(4)
topLeft = (100, 100)
bold = 0
font_size = 10
r, g, b = 0, 255, 255
def on_bold_trackbar(value):
global bold
bold = value
def on_fontsize_trackbar(value):
global font_size
font_size = max(10, value * 5)
def on_r(val):
global r
r = val
def on_g(val):
global g
g = val
def on_b(val):
global b
b = val
cv2.namedWindow("Camera")
cv2.createTrackbar("bold", "Camera", bold, 10, on_bold_trackbar)
cv2.createTrackbar("font size", "Camera", font_size//5, 10, on_fontsize_trackbar)
cv2.createTrackbar('R', 'Camera', 0, 255, on_r)
cv2.createTrackbar('G', 'Camera', 255, 255, on_g)
cv2.createTrackbar('B', 'Camera', 255, 255, on_b)
font_path = "NanumGothic.ttf"
while cap.isOpened():
ret, frame = cap.read()
if not ret:
print("Can't receive frame (stream end?). Exiting . . .")
break
img_pil = Image.fromarray(cv2.cvtColor(frame, cv2.COLOR_BGR2RGB))
draw = ImageDraw.Draw(img_pil)
font = ImageFont.truetype(font_path, font_size)
text = 'LEE 은성'
# Bold 효과: 여러 번 겹쳐 그리기
for dx in range(-bold, bold+1):
for dy in range(-bold, bold+1):
draw.text((topLeft[0]+dx, topLeft[1]+dy), text, font=font, fill=(r, g, b, 0))
frame = cv2.cvtColor(np.array(img_pil), cv2.COLOR_RGB2BGR)
cv2.imshow("Camera", frame)
key = cv2.waitKey(1)
if key & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
💡 출력 결과